半导体自动化
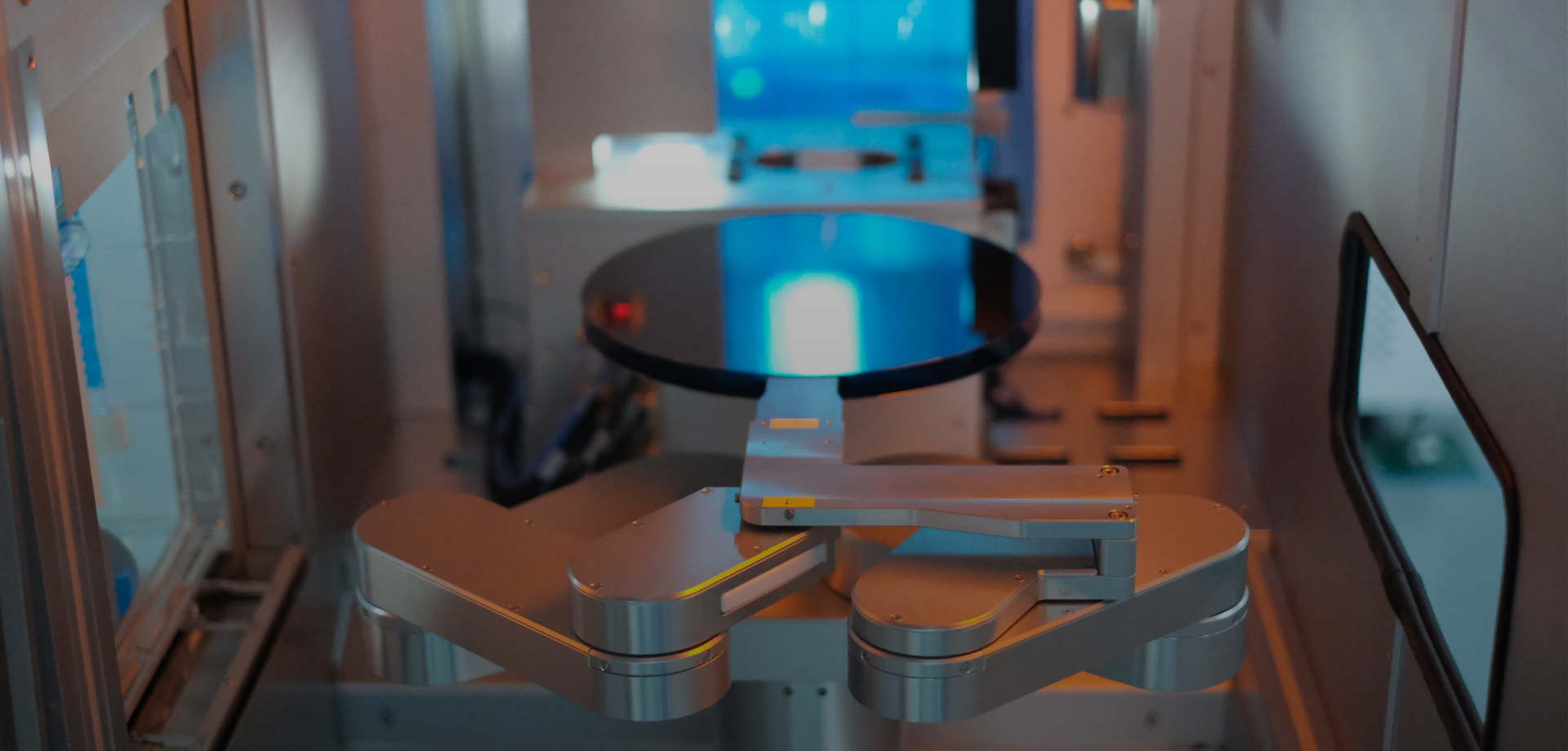
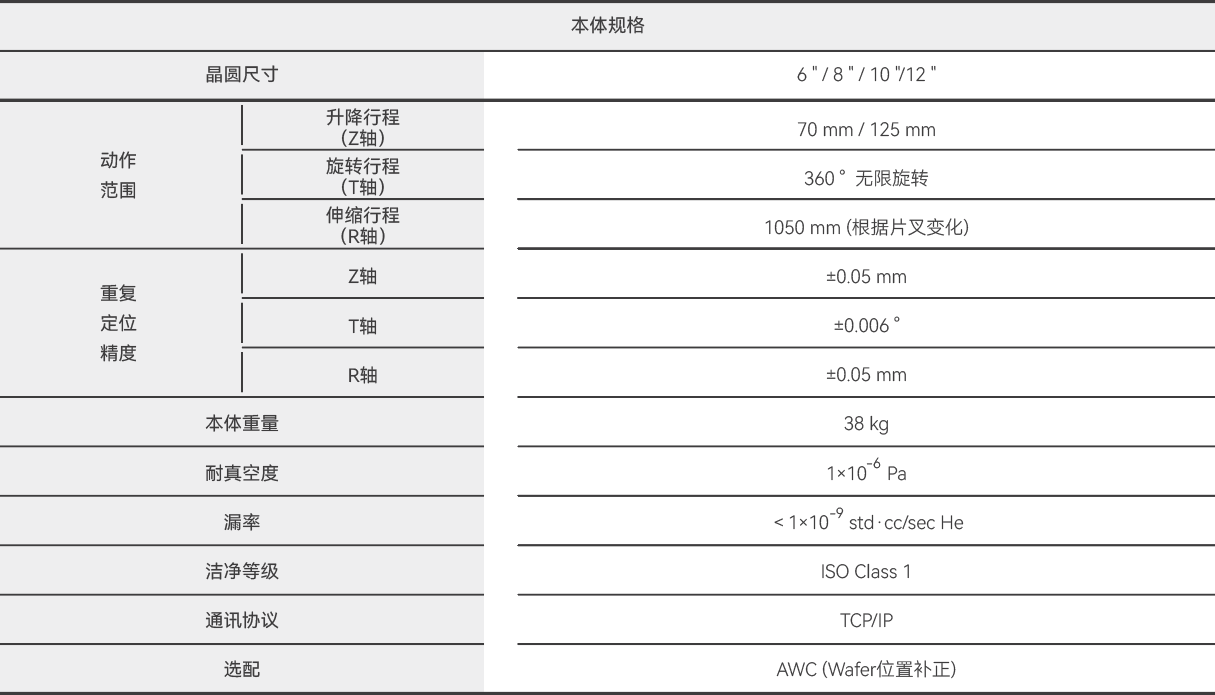
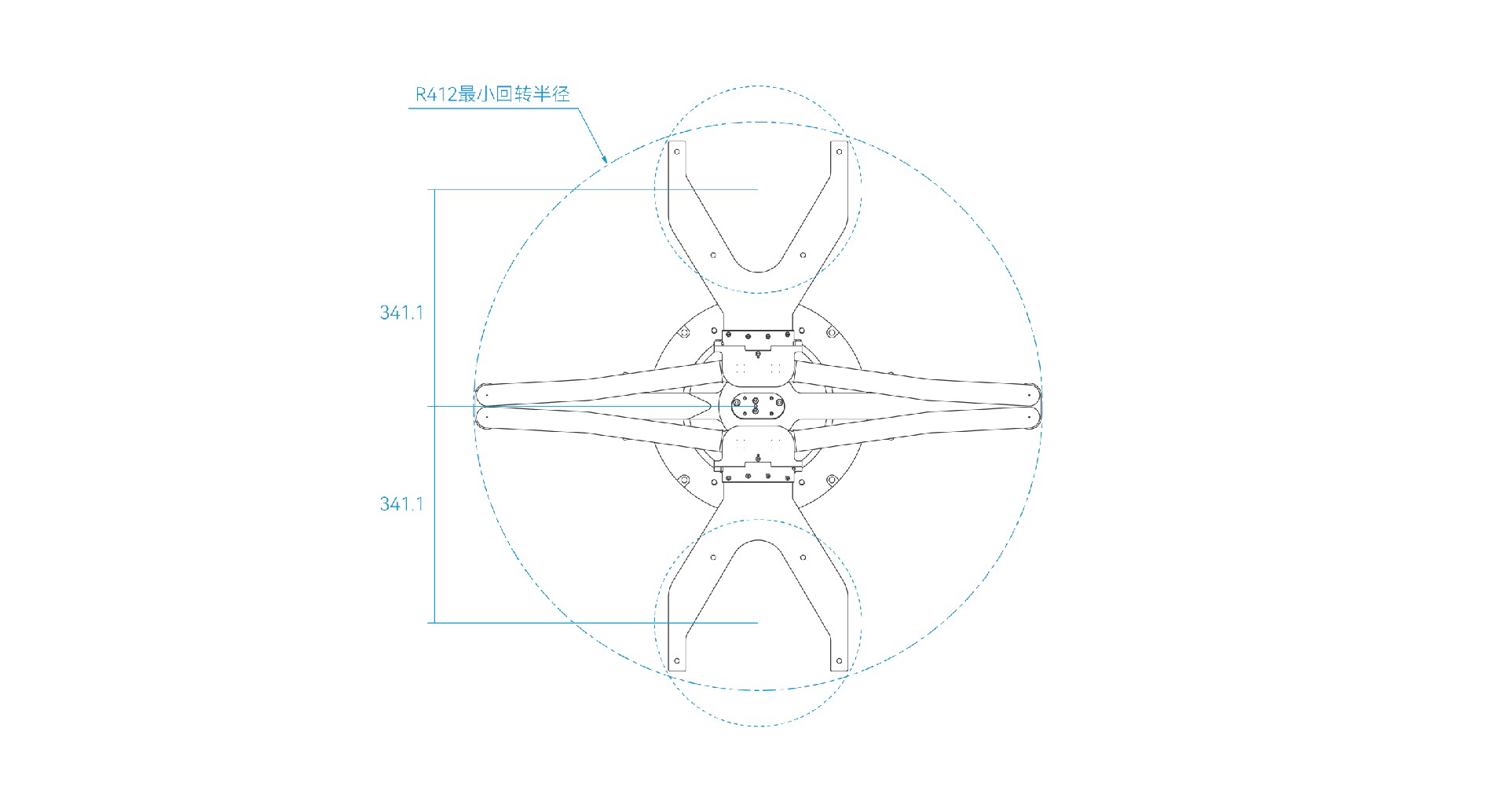
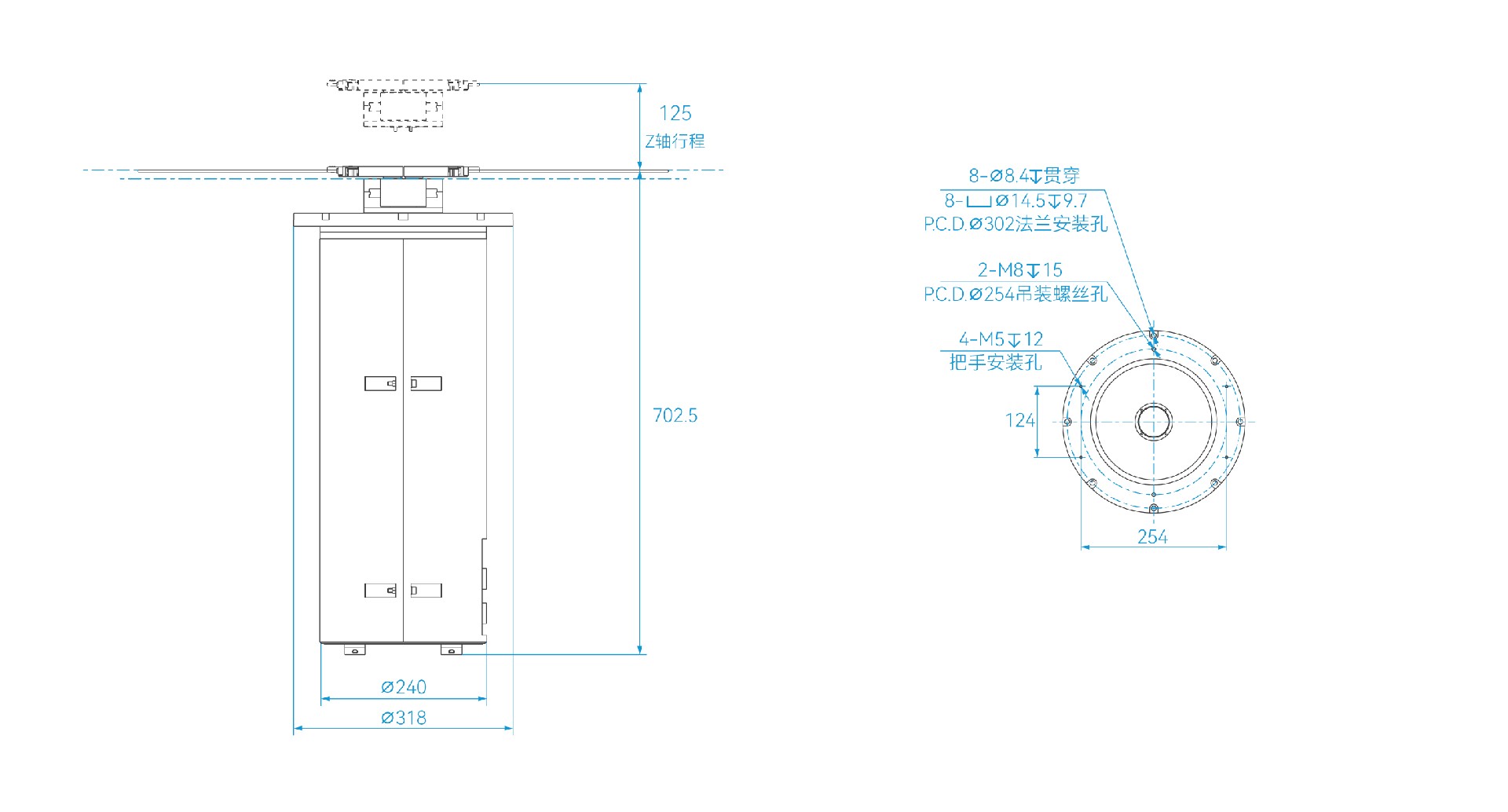
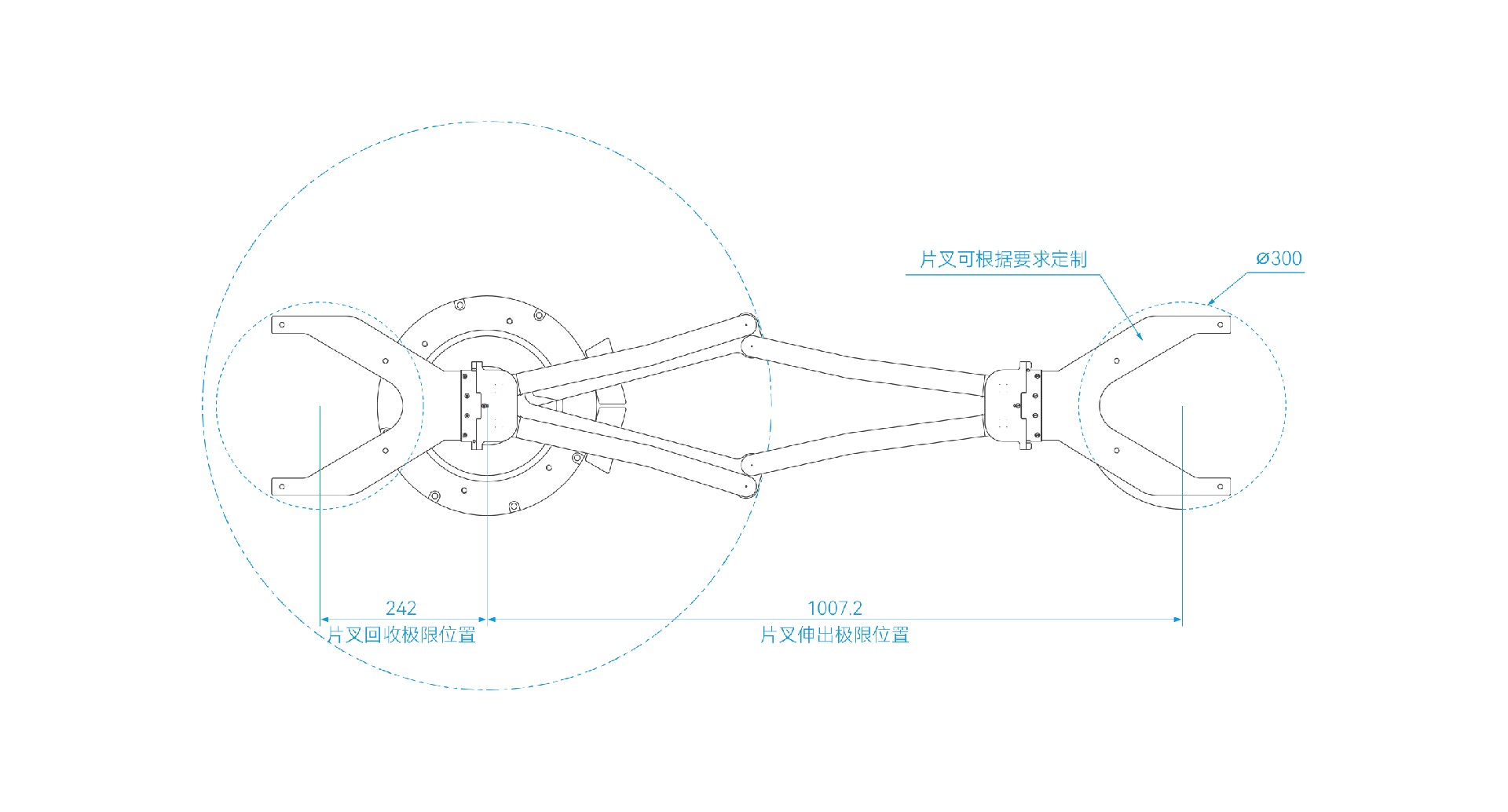
作为晶圆的真空传输系统中的基板搬运机器人,XIVI的真空机械手的全连杆手臂机构可实现更高的定位精度。采用全闭环控制方式,搭载真空直驱电机,拥有更高的回转精度与更快的响应时间,双向双臂的配置,可以在不扩大腔室的情况下比传统型号传输更长的距离,且面对多工位,拥有更高的工作效率。当需要在高真空环境中以经过验证的精度和可重复性传输基板时,XIVI的真空机械手实现了高定位重复性和高可靠的真空分区性能。